









8月3日,西北工业大学研究团队的学生给原理验证样机装上蒙皮。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄

原理验证样机在西北工业大学的游泳池内进行转弯(8月3日摄)。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄
西北工业大学研究团队与原理验证样机合影(8月3日摄)。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄

8月3日,西北工业大学研究团队的师生对原理验证样机进行调试。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄
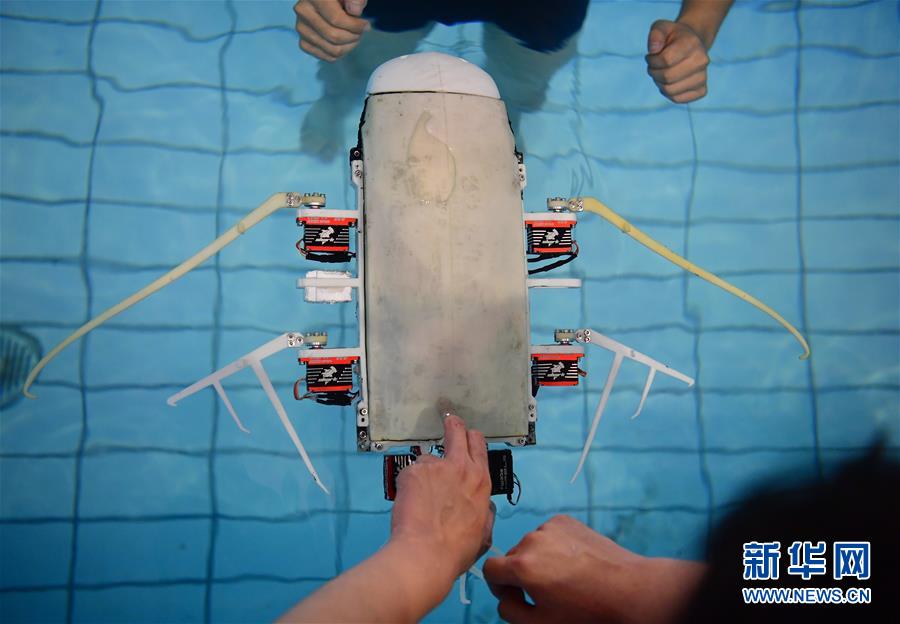
8月3日,西北工业大学研究团队的学生在调试原理验证样机的内部骨架。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄

原理验证样机在西北工业大学的游泳池内展示扑动前进(8月3日摄)。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄

这是西北工业大学研究团队研制的I型工程样机(8月3日摄)。I型工程样机翼展2米,重120公斤,采用刚性机翼,主要验证滑翔能力。
日前,由西北工业大学牵头研制的滑扑一体自主变形仿生柔体潜航器在西安成功首航。自主变形仿生柔体潜航器项目以蝠鲼为仿生原型,将具备高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。 这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的各种运动姿态。同时,研究团队正在开展三型工程样机的研制,将具备1000米下潜深度,可持续工作1个月的能力。
新华社记者 邵瑞 摄
Copyright © 2001-2026 湖北荆楚网络科技股份有限公司 All Rights Reserved
互联网新闻信息许可证 4212025003 -
增值电信业务经营许可证 鄂B2-20231273 -
广播电视节目制作经营许可证(鄂)字第00011号
信息网络传播视听节目许可证 1706144 -
互联网出版许可证 (鄂)字3号 -
营业执照
鄂ICP备 13000573号-1  鄂公网安备 42010602000206号
鄂公网安备 42010602000206号
版权为 荆楚网 www.cnhubei.com 所有 未经同意不得复制或镜像


