








湖北日报全媒记者 刘洁
“请介绍下你自己。”
“嗨,我是天问,武汉大学自主研发的人形机器人。我身高1米78,体重65公斤……”
“你现在可以看到什么?”
“我现在看到的是一个实验室环境,有一些工具和设备,旁边有一个柜子……”
12月9日,武汉大学智能制造实验室,5个多月大的“天问”,正在和研发人员对话。
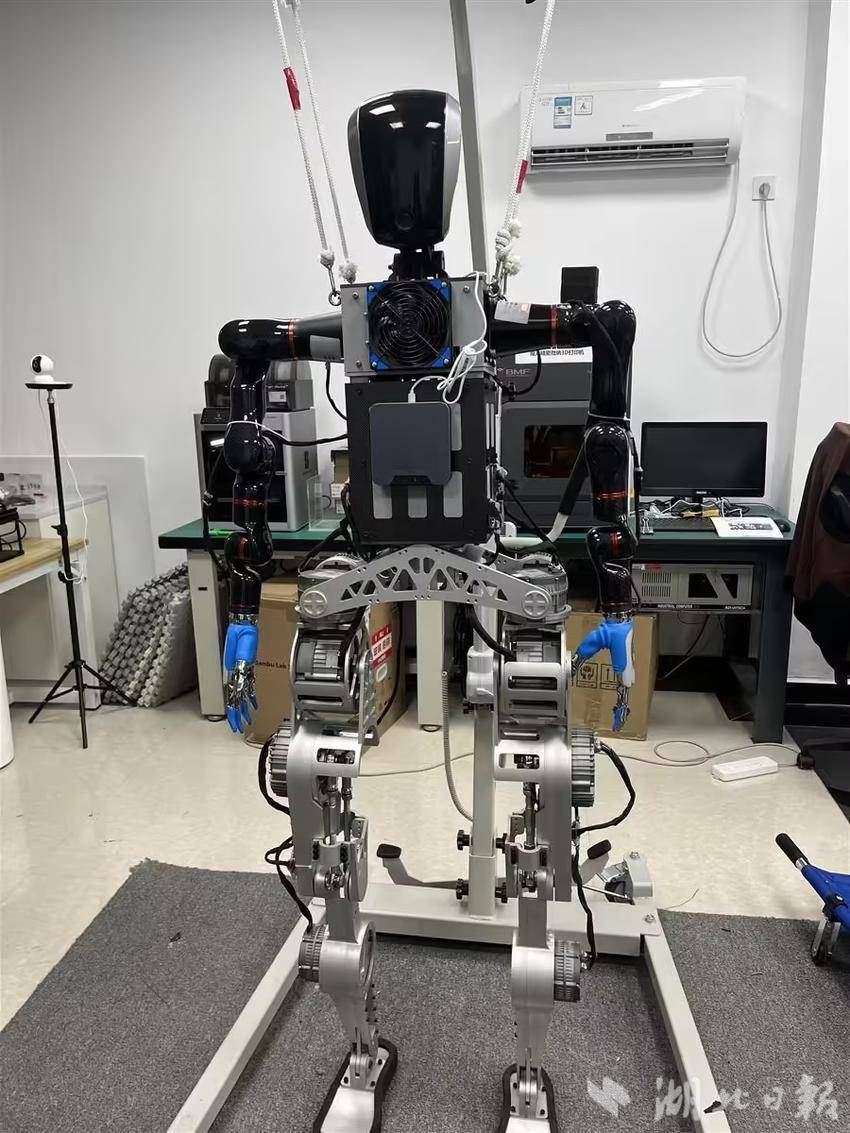
“天问”,取名灵感来源于屈原的名篇《天问》,是武汉大学刘胜院士统筹研制的人形机器人,目前可以实现走路、转弯、抓取、聊天等功能。
“人形机器人最核心的部位是‘大脑’和‘小脑’,头脑中的芯片让它实现人机交互功能,不仅能‘看’到前方的人和物品,友好地与人握手,还能伸手抓取物件。”武汉大学工业科学研究院副教授、刘胜院士团队核心成员李淼说。
在“天问”面前放置半瓶可乐、满瓶矿泉水、小玩偶,“天问”识别物体后,缓缓伸出“手指”,依次抓住物品,轻轻放到一旁的托盘上。
“它通过手部的视触觉传感器获取感知信息,自动设计出对应的最佳力度,然后通过连接手指指骨的腱绳,实现手部关节运动的自适应调整,可以精准地握起,力度柔和,不至于捏坏物品。”李淼说。
操作是人形机器人控制的一大重点,针对不同形态的物品,机器人手如何抓得稳、握得住,实现类似人手的抓取效果,是人形机器人要攻克的重要难题之一。
李淼介绍,“天问”有36个自由度,其中灵巧手的自由度就有7个,抓握能力很强。除了强调力量和精准度的“灵巧手”,团队还研发了另一种“柔性手”,其具有高灵活性和适应性的特质。
现场,“柔性手”展示了它的功能——用手指握住一根长形棒,在编钟上敲了一首《小星星》的旋律。
“目前我们自主研发的‘灵巧手’‘柔性手’都可以实现大规模量产。”李淼说,“天问”可以抓取2公斤以内的物品,团队正在给它设计制作更强壮的上肢。
“天问”还具备独立行走的能力。下达指令后,只见“天问”膝盖弯曲,迈着小碎步,向前走、转弯,或原地踏步。
“组合成一个完整的‘人’,难度不亚于造一辆车,上臂类似于前轮,下肢类似于后轮,涉及传感器、灵巧手、仿生关节、芯片等上千个零部件,极其复杂。”李淼说。
“天问”从研发至今,不过5个多月,为何如此迅速?
“我们充分利用学校的跨学科优势,综合计算机科学、动力与机械工程、城市设计、测绘遥感等11个学科,联合攻关核心问题,寻找技术方案。”李淼说。
此外,“天问”的核心零部件,90%以上来自省内。例如“天问”的“大脑”和“小脑”芯片,来自湖北芯片企业“黑芝麻”;在大模型方面,团队与计算机学院、科大讯飞合作,降低了产业链上下游间的沟通成本。
李淼介绍,“天问”一代身高1米78,性别为“男”;“天问”二代身高1米6,性别为“女”,可以走得更稳,性能更优。
据悉,“天问”二代将于年底亮相。
Copyright © 2001-2026 湖北荆楚网络科技股份有限公司 All Rights Reserved
互联网新闻信息许可证 4212025003 -
增值电信业务经营许可证 鄂B2-20231273 -
广播电视节目制作经营许可证(鄂)字第00011号
信息网络传播视听节目许可证 1706144 -
互联网出版许可证 (鄂)字3号 -
营业执照
鄂ICP备 13000573号-1  鄂公网安备 42010602000206号
鄂公网安备 42010602000206号
版权为 荆楚网 www.cnhubei.com 所有 未经同意不得复制或镜像


